在點火模塊領域健科電子產品基本涵括全球所有車型對應的產品,包括很多復雜點火系統的點火模塊,如多次點火功能,帶判缸功能的點火模塊,離子流檢測模塊等等。
健科的微電機控制器覆蓋了電機控制的FOC、SVPWM以及方波所有的控制方式。在微電機控制器、傳感器及其它汽車電子產品上,健科有豐富的CAN協議、LIN協議、BSD協議、SPI協議等經驗,并都有成熟的產品。
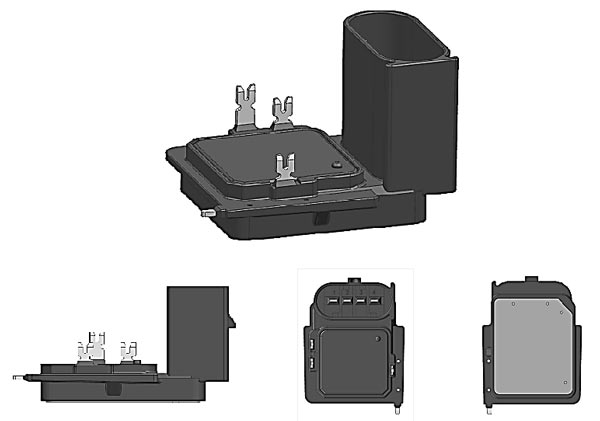
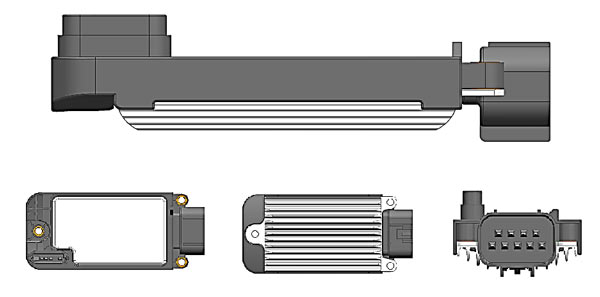
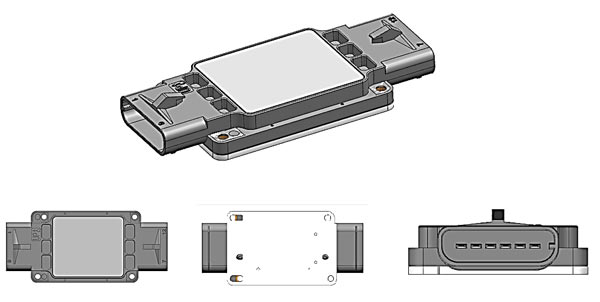
JK-M143 Series
功能特征
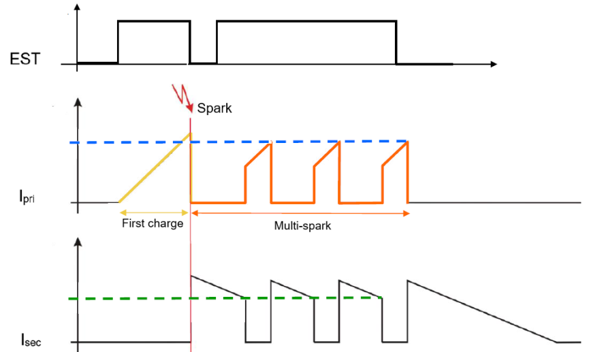
1、多次點火功能
2、初次級電流檢測
3、初級電流反饋
4、初級電流限流關斷保護
5、多次點火時間保護
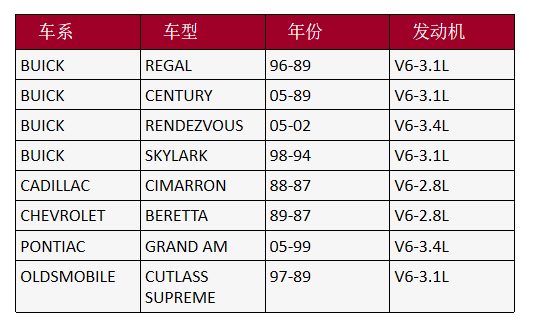
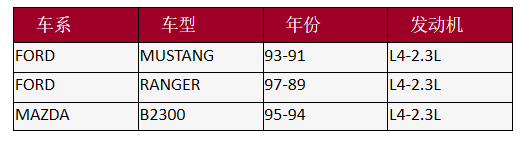
應用車型

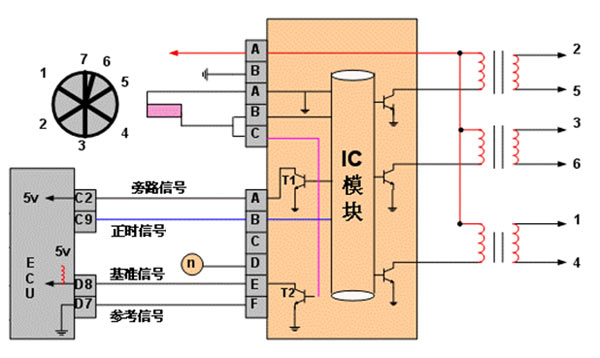
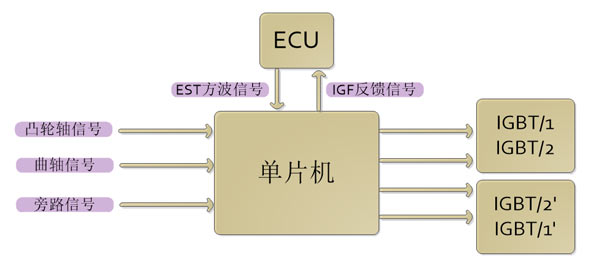
JK-M153A-001
功能特征
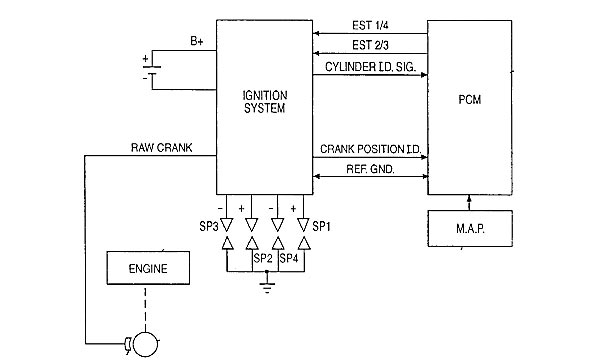
1、判缸
2、點火時序分配
3、轉速信號輸出
4、閉合角調整
5、雙工作模式切換
應用車型
JK-M155A-001
功能特征
1、次級點火信號感應
2、判缸信號輸出
3、點火時序分配
4、時間保護
應用車型

JK-M157A-001
功能特征
1、判缸
2、點火時序分配
3、點火信號反饋
4、雙工作模式切換
應用車型
控制器局域網CAN(Controller Area Network),最初是由德國BOSCH公司設計的,應用于氣的的監測和控制。
1991年9月,Philips半導體公司制定并發布CAN技術規范:CAN 2.0A/B。1993年11月,ISO組織正式頒布CAN國際標準ISO11898。
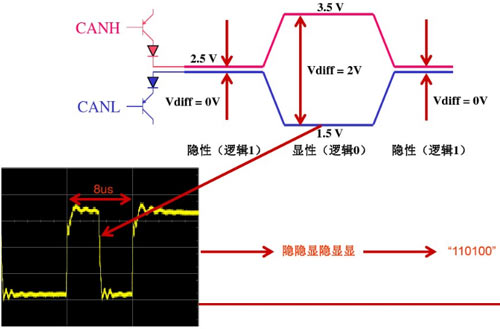
CAN總線電平標稱值
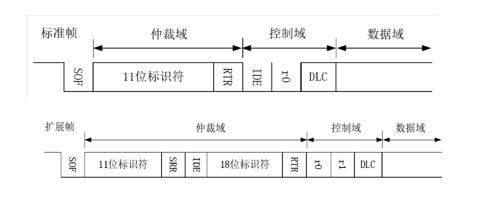
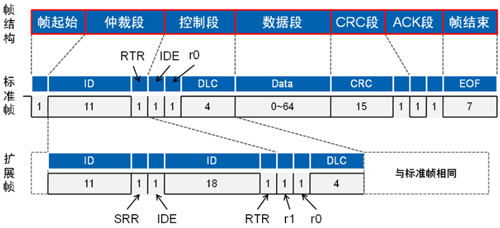
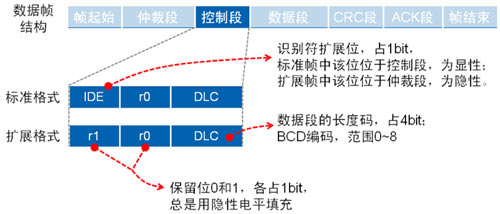
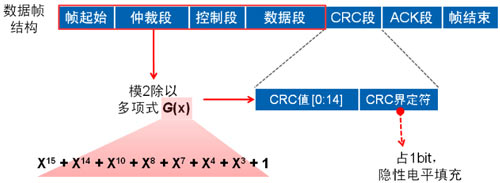
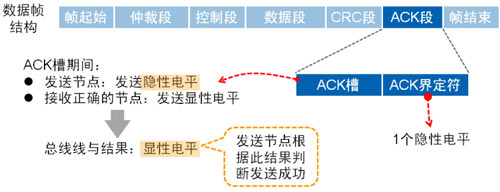
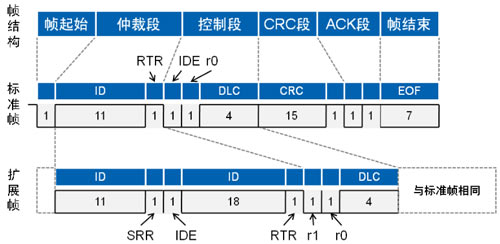
數據幀
結構上由7個段組成,幀起始、仲裁段、控制段、數據段、CRC段、ACK段和幀結束(VBUS/2)進行比較。圖下圖顯示了實現該方法所用的電路。
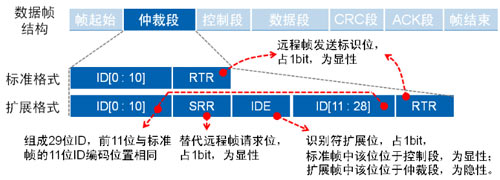
遠程幀
與數據幀相比,遠程幀結構上無數據段,由6個段組成,同 理分標準幀格式和擴展幀格式,且RTR位為1(隱性電平)。
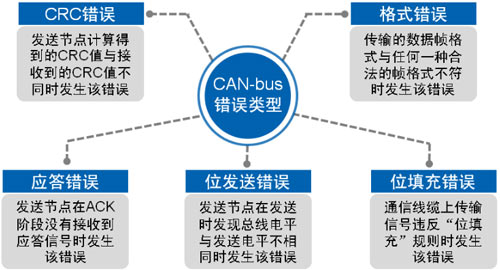
錯誤幀
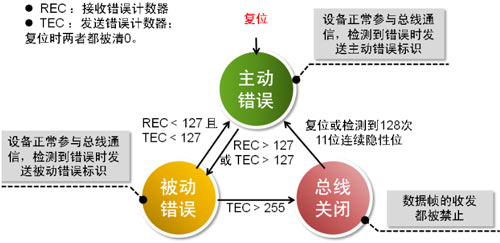
盡管CAN通訊的可靠性很高,但是依然可能出現錯誤。錯誤類型有一下五種。
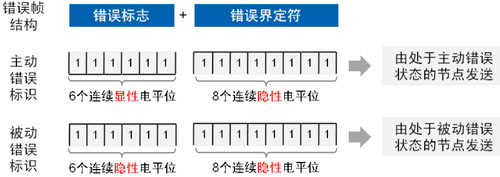
為防止自身由于某些原因導致無法正常接收額節點一直發送錯誤幀,干擾其他節點通信,CAN BUS 規定了節點的3種狀態及其行為。
過載幀
當某個接收點沒有做好接受下幀數據的準備時,將發送過載幀以通知發送節點,過載幀由過載標志和過載界定符組成。
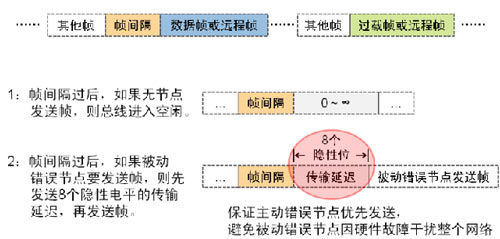
幀間隔
幀間隔用于將數據幀或遠程幀和他們之間的幀分離開, 但過載幀和錯誤幀前門不會插入幀間隔。
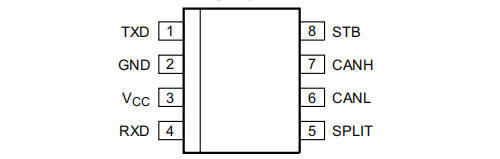
CAN BUS IC典型分類及代表
高速CAN: TJA1042T
低速/容錯CAN:TJA1054T
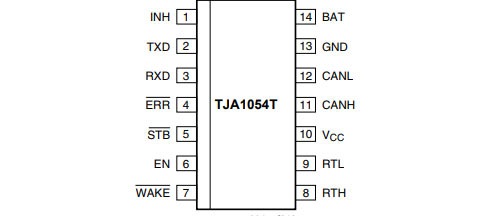
低速/容錯CAN:TJA1054T
LIN Bus

汽車四大通訊協議: LIN、CAN、FlexRay、MOST
LIN總線是針對汽車分布式電子系統而定義的一種低成本,低速的串行通訊網絡,是對控制器區域網絡(CAN)的一種補充。LIN總線是基于SCI(UART)數據格式,采用單主控制器/多從設備的模式,是UART中的一種特殊情況
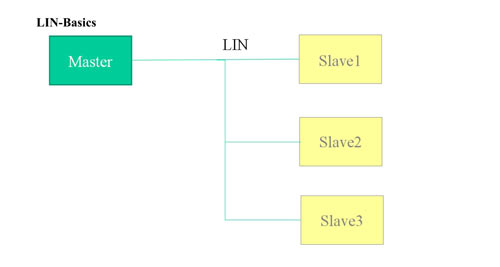
LIN總線的特點及結構
單總線(+GND和Vbat)
主/從概念
只有 1 個主節點 ,多個從節點
主節點控制著總線
總線速度 9600...1920Bit/s
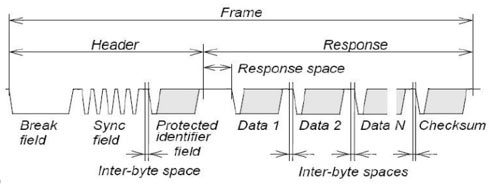
在 LIN 總線上傳輸數據幀是由下列元素組成的最小單位:
間斷、同步、幀標識符、數據字節(1...8)和校驗和
間斷、同步、幀標識符(Header)總是靠主節點傳輸
數據字節由主節點或一個從節點提供,取決于這個主節點和從節點是否為幀的發布者
幀的節點任務是在 LIN 描述文件(LDF)中定義的,每個幀(幀標識符)被指定為一個發布者的節點
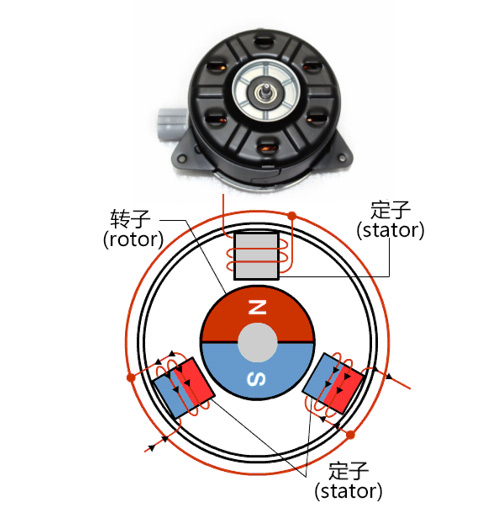
BLDC方波控制
BLDC 電機在傳統上被定義為一個具有梯形反電動勢波形形狀的永磁同步電機。
由于電勵磁必須與轉子位置同步,因此 BLDC 電機在運行時,通常需要一個或多個轉子位置傳感器。由于成本、可靠性的原因,電機適宜在無位置傳感器的條件下運行,即通常所說的無傳感器運行。通過檢測不通電相繞組上的BEMF電壓可以確定電機驅動電壓的換相時間。
無位置傳感器算法優點:
1.節省器件成本和安裝成本。
2.提高穩定性,位置傳感器芯片在高溫,高濕換相下易損壞。所以健科電子推出無位置傳感器控制技術,很好解決上述問題。
BLDC無位置傳感器控制的兩種算法
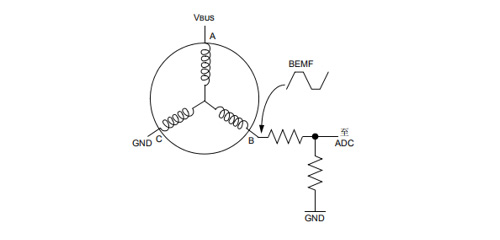
過零點檢測法
BEMF電壓與直流母線電壓的一半進行比較該方法是在假定BEMF電壓等VDC/2時發生過零事件的情況下,利用比較器將 BEMF 電壓與直流母線電壓的一半(VBUS/2)進行比較。圖下圖顯示了實現該方法所用的電路。
優點 :運算量小,可以實現高轉速
缺點:不夠靈活。
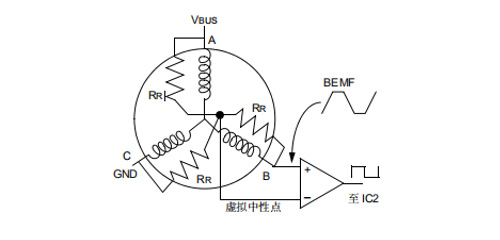
電壓比較法
可以通過使用可變閾值電壓點檢測過零事件來加以簡化。該可變電壓就是電機的中性點。大多數 BLDC 電機的中性點不會用導線引出。但可以用電阻網絡來構造中性點。將三個電阻 的一端分別與電機的三相繞組并聯,另一端連在一起以產生一個虛擬中性點,如下圖所示。
優點 :算法靈活多變,可實現快速啟動。
缺點:運算量大,算法復雜。

健科電子無位置傳感器的BLDC方波控制方案優勢:
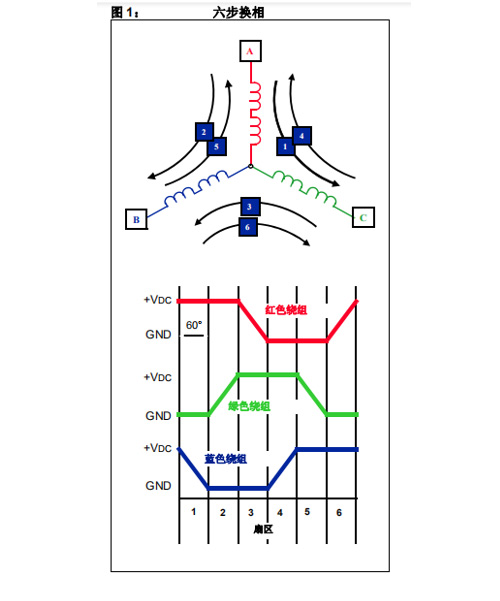
1. 更寬的調速范圍。
傳統的控制算法,某一時刻,只有一個上橋和一個下橋導通,健科電子的優化了算法,再兩兩導通基礎上,增加了三三導通,提高了導通角,從而增加轉速。
缺點:運算量大,算法復雜。
2. 更快的啟動性能。
健科電子的快速啟動算法,已經應用在燃油泵,可確保150ms內,啟動到最高轉速。
3. 高魯棒性。
健科電子使用MCU的比較器檢測電機BEMF,降低成本的同時,可實現更復雜的軟件算法,從而提高魯棒性。



