在點(diǎn)火模塊領(lǐng)域健科電子產(chǎn)品基本涵括全球所有車型對(duì)應(yīng)的產(chǎn)品,包括很多復(fù)雜點(diǎn)火系統(tǒng)的點(diǎn)火模塊,如多次點(diǎn)火功能,帶判缸功能的點(diǎn)火模塊,離子流檢測(cè)模塊等等。
健科的微電機(jī)控制器覆蓋了電機(jī)控制的FOC、SVPWM以及方波所有的控制方式。在微電機(jī)控制器、傳感器及其它汽車電子產(chǎn)品上,健科有豐富的CAN協(xié)議、LIN協(xié)議、BSD協(xié)議、SPI協(xié)議等經(jīng)驗(yàn),并都有成熟的產(chǎn)品。
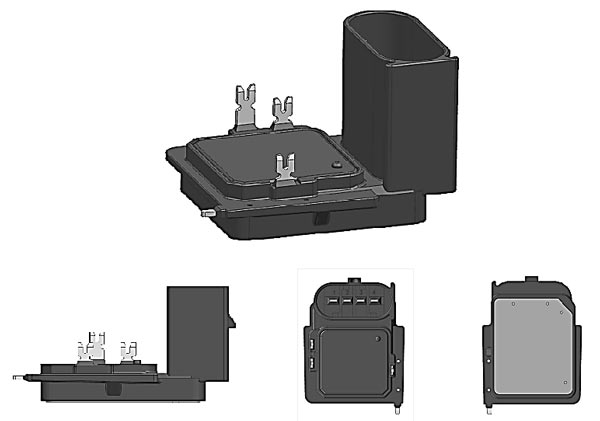
JK-M143 Series
功能特征
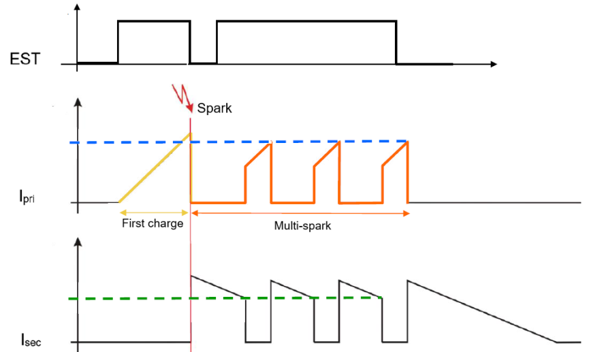
1、多次點(diǎn)火功能
2、初次級(jí)電流檢測(cè)
3、初級(jí)電流反饋
4、初級(jí)電流限流關(guān)斷保護(hù)
5、多次點(diǎn)火時(shí)間保護(hù)
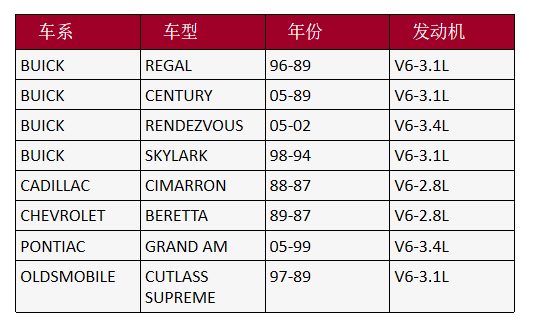
應(yīng)用車型

JK-M153A-001
功能特征
1、判缸
2、點(diǎn)火時(shí)序分配
3、轉(zhuǎn)速信號(hào)輸出
4、閉合角調(diào)整
5、雙工作模式切換
應(yīng)用車型
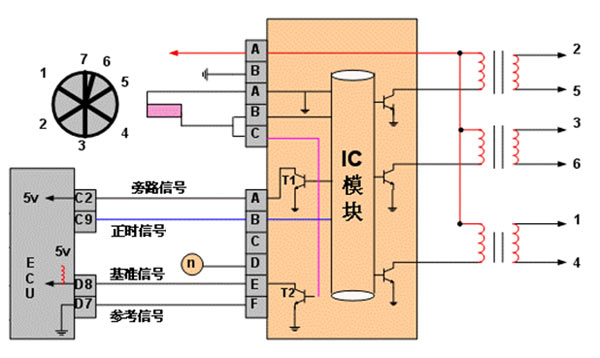
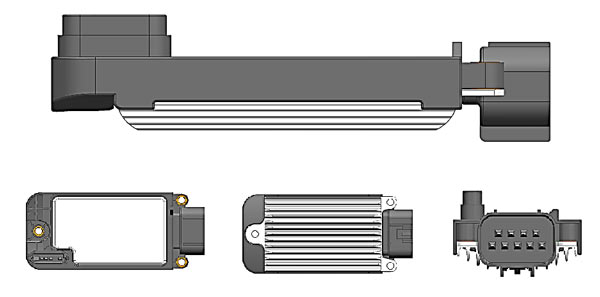
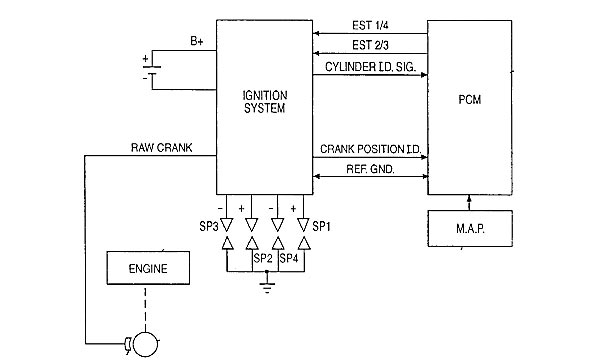
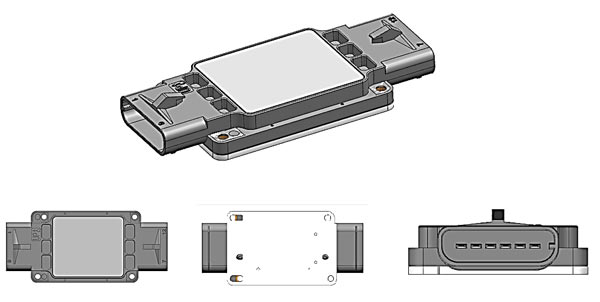
JK-M155A-001
功能特征
1、次級(jí)點(diǎn)火信號(hào)感應(yīng)
2、判缸信號(hào)輸出
3、點(diǎn)火時(shí)序分配
4、時(shí)間保護(hù)
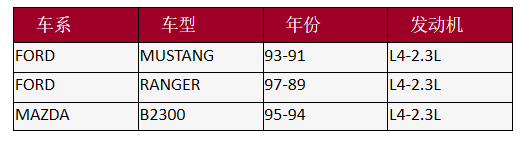
應(yīng)用車型

JK-M157A-001
功能特征
1、判缸
2、點(diǎn)火時(shí)序分配
3、點(diǎn)火信號(hào)反饋
4、雙工作模式切換
應(yīng)用車型
控制器局域網(wǎng)CAN(Controller Area Network),最初是由德國BOSCH公司設(shè)計(jì)的,應(yīng)用于氣的的監(jiān)測(cè)和控制。
1991年9月,Philips半導(dǎo)體公司制定并發(fā)布CAN技術(shù)規(guī)范:CAN 2.0A/B。1993年11月,ISO組織正式頒布CAN國際標(biāo)準(zhǔn)ISO11898。
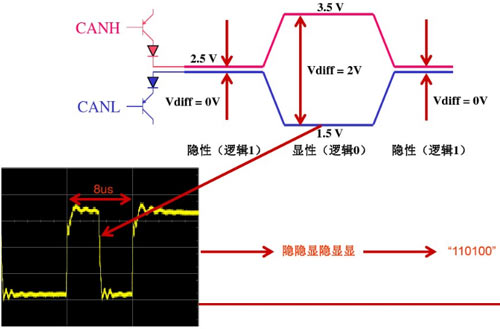
CAN總線電平標(biāo)稱值
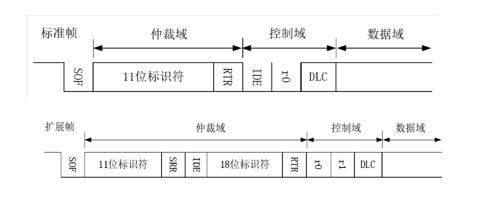
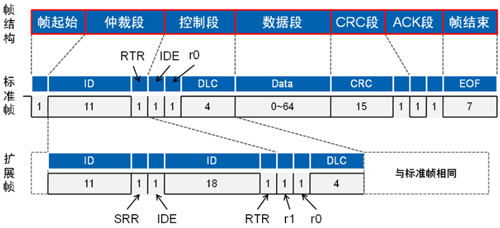
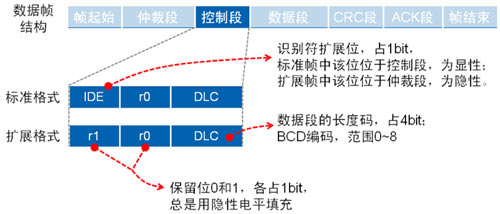
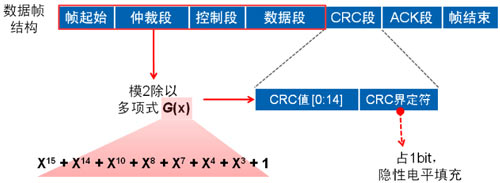
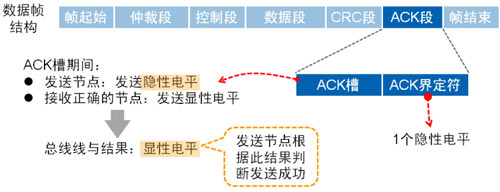
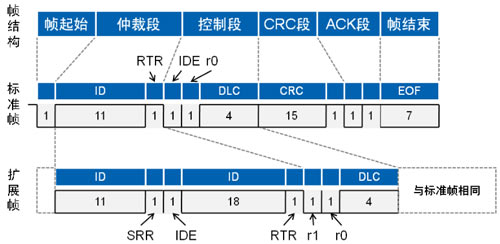
數(shù)據(jù)幀
結(jié)構(gòu)上由7個(gè)段組成,幀起始、仲裁段、控制段、數(shù)據(jù)段、CRC段、ACK段和幀結(jié)束(VBUS/2)進(jìn)行比較。圖下圖顯示了實(shí)現(xiàn)該方法所用的電路。
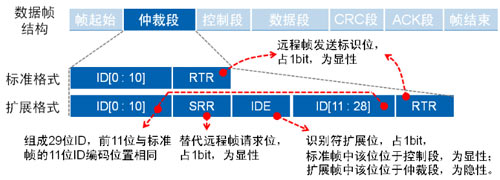
遠(yuǎn)程幀
與數(shù)據(jù)幀相比,遠(yuǎn)程幀結(jié)構(gòu)上無數(shù)據(jù)段,由6個(gè)段組成,同 理分標(biāo)準(zhǔn)幀格式和擴(kuò)展幀格式,且RTR位為1(隱性電平)。
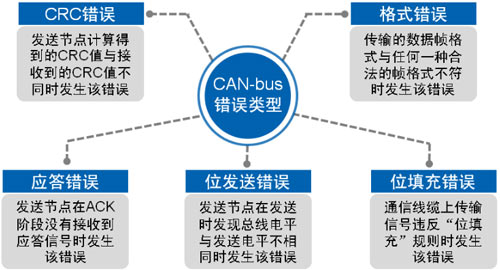
錯(cuò)誤幀
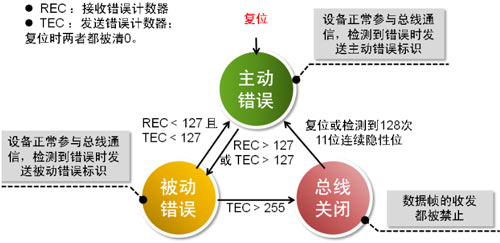
盡管CAN通訊的可靠性很高,但是依然可能出現(xiàn)錯(cuò)誤。錯(cuò)誤類型有一下五種。
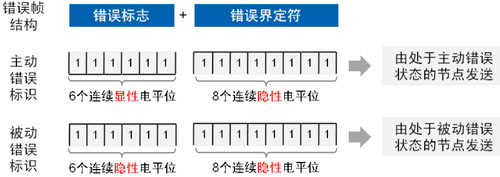
為防止自身由于某些原因?qū)е聼o法正常接收額節(jié)點(diǎn)一直發(fā)送錯(cuò)誤幀,干擾其他節(jié)點(diǎn)通信,CAN BUS 規(guī)定了節(jié)點(diǎn)的3種狀態(tài)及其行為。
過載幀
當(dāng)某個(gè)接收點(diǎn)沒有做好接受下幀數(shù)據(jù)的準(zhǔn)備時(shí),將發(fā)送過載幀以通知發(fā)送節(jié)點(diǎn),過載幀由過載標(biāo)志和過載界定符組成。
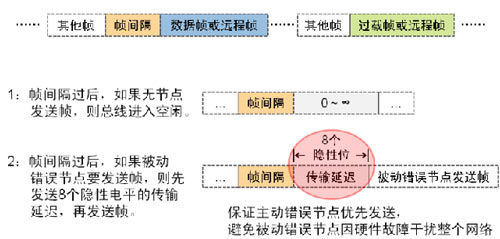
幀間隔
幀間隔用于將數(shù)據(jù)幀或遠(yuǎn)程幀和他們之間的幀分離開, 但過載幀和錯(cuò)誤幀前門不會(huì)插入幀間隔。
CAN BUS IC典型分類及代表
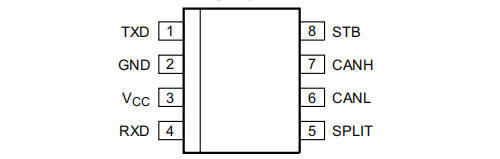
高速CAN: TJA1042T
低速/容錯(cuò)CAN:TJA1054T
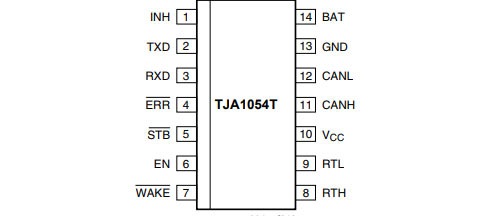
低速/容錯(cuò)CAN:TJA1054T
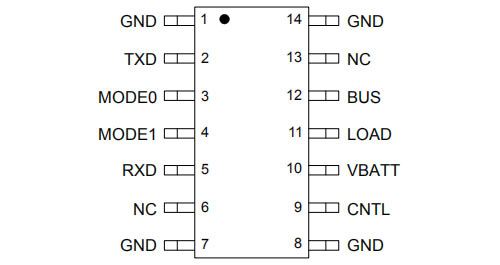
LIN Bus
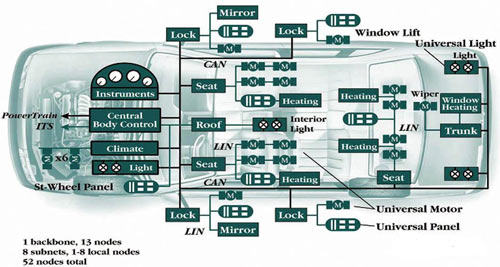

汽車四大通訊協(xié)議: LIN、CAN、FlexRay、MOST
LIN總線是針對(duì)汽車分布式電子系統(tǒng)而定義的一種低成本,低速的串行通訊網(wǎng)絡(luò),是對(duì)控制器區(qū)域網(wǎng)絡(luò)(CAN)的一種補(bǔ)充。LIN總線是基于SCI(UART)數(shù)據(jù)格式,采用單主控制器/多從設(shè)備的模式,是UART中的一種特殊情況
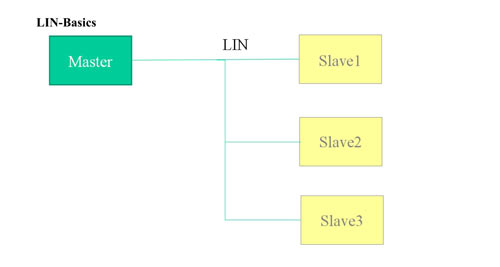
LIN總線的特點(diǎn)及結(jié)構(gòu)
單總線(+GND和Vbat)
主/從概念
只有 1 個(gè)主節(jié)點(diǎn) ,多個(gè)從節(jié)點(diǎn)
主節(jié)點(diǎn)控制著總線
總線速度 9600...1920Bit/s
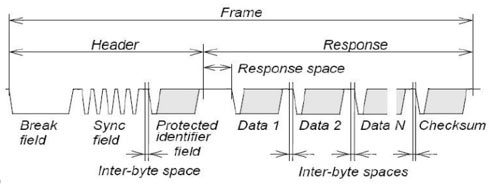
在 LIN 總線上傳輸數(shù)據(jù)幀是由下列元素組成的最小單位:
間斷、同步、幀標(biāo)識(shí)符、數(shù)據(jù)字節(jié)(1...8)和校驗(yàn)和
間斷、同步、幀標(biāo)識(shí)符(Header)總是靠主節(jié)點(diǎn)傳輸
數(shù)據(jù)字節(jié)由主節(jié)點(diǎn)或一個(gè)從節(jié)點(diǎn)提供,取決于這個(gè)主節(jié)點(diǎn)和從節(jié)點(diǎn)是否為幀的發(fā)布者
幀的節(jié)點(diǎn)任務(wù)是在 LIN 描述文件(LDF)中定義的,每個(gè)幀(幀標(biāo)識(shí)符)被指定為一個(gè)發(fā)布者的節(jié)點(diǎn)
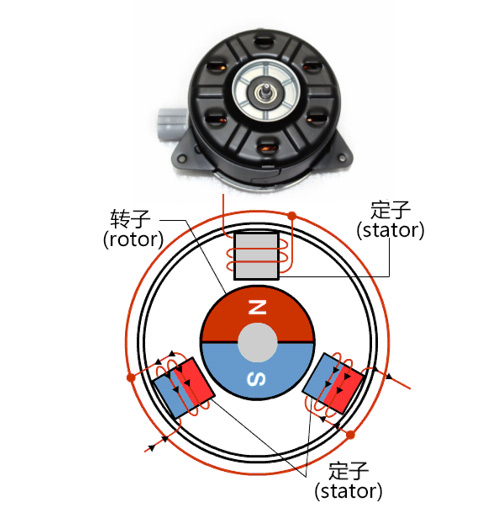
BLDC方波控制
BLDC 電機(jī)在傳統(tǒng)上被定義為一個(gè)具有梯形反電動(dòng)勢(shì)波形形狀的永磁同步電機(jī)。
由于電勵(lì)磁必須與轉(zhuǎn)子位置同步,因此 BLDC 電機(jī)在運(yùn)行時(shí),通常需要一個(gè)或多個(gè)轉(zhuǎn)子位置傳感器。由于成本、可靠性的原因,電機(jī)適宜在無位置傳感器的條件下運(yùn)行,即通常所說的無傳感器運(yùn)行。通過檢測(cè)不通電相繞組上的BEMF電壓可以確定電機(jī)驅(qū)動(dòng)電壓的換相時(shí)間。
無位置傳感器算法優(yōu)點(diǎn):
1.節(jié)省器件成本和安裝成本。
2.提高穩(wěn)定性,位置傳感器芯片在高溫,高濕換相下易損壞。所以健科電子推出無位置傳感器控制技術(shù),很好解決上述問題。
BLDC無位置傳感器控制的兩種算法
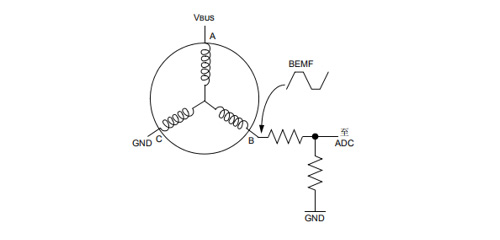
過零點(diǎn)檢測(cè)法
BEMF電壓與直流母線電壓的一半進(jìn)行比較該方法是在假定BEMF電壓等VDC/2時(shí)發(fā)生過零事件的情況下,利用比較器將 BEMF 電壓與直流母線電壓的一半(VBUS/2)進(jìn)行比較。圖下圖顯示了實(shí)現(xiàn)該方法所用的電路。
優(yōu)點(diǎn) :運(yùn)算量小,可以實(shí)現(xiàn)高轉(zhuǎn)速
缺點(diǎn):不夠靈活。
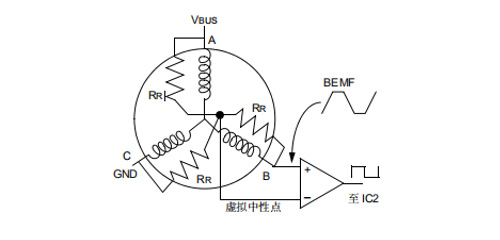
電壓比較法
可以通過使用可變閾值電壓點(diǎn)檢測(cè)過零事件來加以簡(jiǎn)化。該可變電壓就是電機(jī)的中性點(diǎn)。大多數(shù) BLDC 電機(jī)的中性點(diǎn)不會(huì)用導(dǎo)線引出。但可以用電阻網(wǎng)絡(luò)來構(gòu)造中性點(diǎn)。將三個(gè)電阻 的一端分別與電機(jī)的三相繞組并聯(lián),另一端連在一起以產(chǎn)生一個(gè)虛擬中性點(diǎn),如下圖所示。
優(yōu)點(diǎn) :算法靈活多變,可實(shí)現(xiàn)快速啟動(dòng)。
缺點(diǎn):運(yùn)算量大,算法復(fù)雜。

健科電子無位置傳感器的BLDC方波控制方案優(yōu)勢(shì):
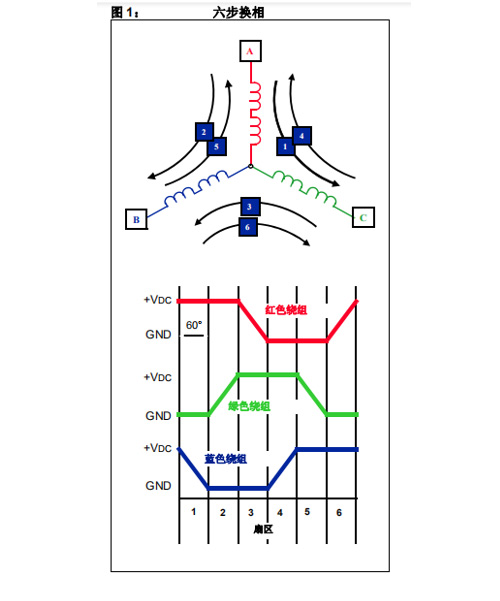
1. 更寬的調(diào)速范圍。
傳統(tǒng)的控制算法,某一時(shí)刻,只有一個(gè)上橋和一個(gè)下橋?qū)ǎ】齐娮拥膬?yōu)化了算法,再兩兩導(dǎo)通基礎(chǔ)上,增加了三三導(dǎo)通,提高了導(dǎo)通角,從而增加轉(zhuǎn)速。
缺點(diǎn):運(yùn)算量大,算法復(fù)雜。
2. 更快的啟動(dòng)性能。
健科電子的快速啟動(dòng)算法,已經(jīng)應(yīng)用在燃油泵,可確保150ms內(nèi),啟動(dòng)到最高轉(zhuǎn)速。
3. 高魯棒性。
健科電子使用MCU的比較器檢測(cè)電機(jī)BEMF,降低成本的同時(shí),可實(shí)現(xiàn)更復(fù)雜的軟件算法,從而提高魯棒性。
電話: 0731-88552129(人事)
電話: 0731-88081666(銷售)
地址: 長(zhǎng)沙市望城經(jīng)濟(jì)技術(shù)開發(fā)區(qū)
航空路10號(hào)
電話: 0755-25214880
傳真: 0755-25227666
地址: 深圳市鹽田區(qū)北山道北山工業(yè)區(qū)3棟


Copyright ? 長(zhǎng)沙市健科電子有限公司粵ICP備19004628號(hào)粵ICP備19004628號(hào)
長(zhǎng)沙市健科電子有限公司 深圳市健科電子有限公司 網(wǎng)站地圖
互聯(lián)網(wǎng)品牌服務(wù):CTMON
電話: 0731-88552129(人事)
電話: 0731-88081666(銷售)
地址: 長(zhǎng)沙市望城經(jīng)濟(jì)技術(shù)開發(fā)區(qū)
航空路10號(hào)
電話: 0755-25214880
傳真: 0755-25227666
地址: 深圳市鹽田區(qū)北山道北山工業(yè)區(qū)3棟

